Tampilkan postingan dengan label elektro. Tampilkan semua postingan
Pengertian Mikrokontroler
|
||

Mikrokontroler adalah
sebuah chip yang berfungsi sebagai pengontrol rangkaian elektronik dan umunya
dapat menyimpan program didalamnya. Mikrokontroler umumnya terdiri dari CPU
(Central Processing Unit), memori, I/O tertentu dan unit pendukung seperti
Analog-to-Digital Converter (ADC) yang sudah terintegrasi di dalamnya.
Kelebihan utama dari mikrokontroler ialah tersedianya RAM dan peralatan I/O
pendukung sehingga ukuran board mikrokontroler menjadi sangat ringkas.
Mikrokontroler merupakan sebuah chip yang terdiri atas mikroprosesor, RAM,ROM,
dan piranti I/O sehingga biasanya disebut single chip microcomputer.
Salah satu keunggulan mikrokontroler adalah adanya RAM, ROM dan piranti I/O
dalam sebuah chip sehingga tidak perlu menambahkan komponen-komponen tersebut
secara fisik.
Aplikasi Mikrokontroler
Karena kemampuannya
yang tinggi, bentuknya yang kecil, konsumsi dayanya yang rendah, dan harga yang
murah maka mikrokontroler begitu banyak digunakan di dunia. Mikrokontroler digunakan
mulai dari mainan anak-anak, perangkat elektronik rumah tangga, perangkat
pendukung otomotif, peralatan industri, peralatan telekomunikasi, peralatan
medis dan kedokteran, sampai dengan pengendali robot serta persenjataan
militer. Terdapat beberapa keunggulan yang diharapkan dari alat-alat yang
berbasis mikrokontroler (microcontroller-based solutions):
- Kehandalan tinggi (high reliability) dan kemudahan integrasi dengan komponen lain (high degree of integration)
- Ukuran yang semakin dapat diperkecil (reduced in size)
- Penggunaan komponen dipersedikit (reduced component count) yang juga akan menyebabkan biaya produksi dapat semakin ditekan (lower manufacturing cost)
- Waktu pembuatan lebih singkat (shorter development time) sehingga lebih cepat pula dijual ke pasar sesuai kebutuhan (shorter time to market)
- Konsumsi daya yang rendah (lower power consumption)
Sistem Mikrokontroler
Sebuah sistem minimum
mikroprosesor memerlukan perangkat-perangkat seperti mikroprosesor, unit
memori, unit masukan dan keluaran, dan rangkaian pendukung lain. Diagram blok
rangkaian sistem minimum mikroprosesor diperlihatkan dalam Gambar 1.2.
 |
| Gambar 1.2 Blok diagram Mikrokontroler |
Dalam sistem
mikroprosesor prinsip kerjanya adalah mengolah suatu data masukan,yang kemudian
hasil olahan tersebut akan menghasilkan keluaran yang dikehendaki. Proses pengolahan
datanya dapat difungsikan sesuai dengan instruksi yang diprogramkan.
Masing-masing mikroprosesor memiliki bahasa pemrograman yang berbeda-beda.
Namun secara prinsip, dasar dari tiap mikroprosesor adalah sama. Tiap
mikroprosesor memiliki satu bus data, satu bus alamat dan satu bus kendali.
Dalam mikroprosesor terdapat suatu unit untuk mengerjakan fungsi – fungsi
logika dan aritmetika, register – register untuk menyimpan data sementara dan
unit pengendalian.
Bus data terdiri
biasanya 4, 8, 16 atau 32 jalur (bit), 64 bit, tergantung dari jenis
mikroprosesornya. Bus data berfungsi memuat data dari dan ke mikroprosesor.
Arah panah menunjukkan arah data dikirim/diterima. Bus alamat merupakan bus
yang berisi alamat-alamat yang datanya akan dikirim/diterima oleh
mikroprosesor. Bus kendali digunakan untuk mensinkronkan kerja antara
mikroprosesor dengan dunia luar sistem. Pada beberapa aplikasi ada yang disebut
dengan istilah jabat tangan, seperti misalnya pada penerapan hubungan dengan
pencetak (printer). Dalam sistem kerjanya mikroprosesor didukung
oleh unit memori (untuk menyimpan program tetap/sementara dan menyimpan data),
unit masukan dan keluaran yang berfungsi sebagai antar muka dengan dunia luar.
Catu daya, rangkaian pembangkit detak (clock), rangkaian pengawas sandi (address
decoder), penyangga (buffer) dan penahan (latch) juga
diperlukan mikroprosesor untuk mendukung operasi kerja sebagai satu rangkaian
yang solid.
Kelebihan Sistem Dengan Mikrokontroler
- Penggerak pada mikrokontoler menggunakan bahasa pemograman assembly dengan berpatokan pada kaidah digital dasar sehingga pengoperasian sistem menjadi sangat mudah dikerjakan sesuai dengan logika sistem (bahasa assembly ini mudah dimengerti karena menggunakan bahasa assembly aplikasi dimana parameter input dan output langsung bisa diakses tanpa menggunakan banyak perintah). Desain bahasa assembly ini tidak menggunakan begitu banyak syarat penulisan bahasa pemrograman seperti huruf besar dan huruf kecil untuk bahasa assembly tetap diwajarkan.
- Mikrokontroler tersusun dalam satu chip dimana prosesor, memori, dan I/O terintegrasi menjadi satu kesatuan kontrol sistem sehingga mikrokontroler dapat dikatakan sebagai komputer mini yang dapat bekerja secara inovatif sesuai dengan kebutuhan sistem.
- Sistem running bersifat berdiri sendiri tanpa tergantung dengan komputer sedangkan parameter komputer hanya digunakan untuk download perintah instruksi atau program. Langkah-langkah untuk download komputer dengan mikrokontroler sangat mudah digunakan karena tidak menggunakan banyak perintah.
- Pada mikrokontroler tersedia fasilitas tambahan untuk pengembangan memori dan I/O yang disesuaikan dengan kebutuhan sistem.
- Harga untuk memperoleh alat ini lebih murah dan mudah didapat.
Arduino sudah menjadi
salah satu modul mikrokontroler yang cukup populer sejak beberapa tahun ini.
Sifatnya yang open source dan semakin banyak dukungan library
gratis di internet adalah salah satu alasan mengapa Arduino bisa populer yang
bisa ditemui di hampir setiap toko online elektronik.
Bagi para pemula, modul
ini sangat bagus untuk belajar pemrograman mikrokontroler, karena kita tidak
perlu mengembangkan terlalu banyak di sisi hardware. Kita tidak perlu membuat PCB,
pasang komponen, solder dan belum lagi uji coba hardware, yang cukup memakan
waktu. Tapi saya menyarankan, jika Anda punya banyak waktu, akan lebih bagus
silakan merakit sendiri, namun saya tidak bahas di artikel ini.
Sebelum membahas
pemrograman Arduino, kita tinjau dulu apa yang bisa dilakukan oleh Arduino
dalam mengendalikan peralatan elektronik. Semua jenis modul Arduino
memiliki port masukan (input) dan keluaran (output)
digital yang bisa dihubungkan langsung ke peralatan misalnya tombol, saklar,
sensor (masukan) dan relay, LED (keluaran). Jumlah port tergantung dari
jenis Arduino, apakah Uno, Mega, atau Micro. Apa yang dapat dilakukan selain
hanya sekedar mengendalikan lampu?

Papan Arduino merupakan
basic module yang dapat kita tumpuk secara bertingkat dengan modul
tambahan lain (istilah yang digunakan adalah SHEILD) yang memiliki fungsi
tersendiri.
Contoh sheild yang
beredar di pasaran:
- Character LCD and Button shield: untuk menayangkan pesan melalui LCD 16x2 karakter dan terdapat beberapa tombol, bisa kita manfaatkan untuk navigasi menu.
- Graphics TFT-LCD shield: untuk menampilkan pesan berupa grafik dan sekaligus dapat menerima input melalui layar sentuh.
- WiFi shield: untuk berkomunikasi melalui jaringan W-LAN, baik intranet maupun internet.
- Ethernet shield: untuk berkomunikasi melalui LAN menggunakan kabel ethernet.
- GSM/GPRS sheild: untuk berkomunikasi melalui jaringan GSM (fitur SMS) atau GPRS (fitur internet mobile). Jika dilengkapi dengan GPS, dapat pula untuk mengetahui lokasi.
- USB-Host shield: untuk berkomunikasi melalui USB, contohnya kita dapat menerima masukan dari USB mouse/keyboard ( Human Input Device, HID), membaca/menulis USB Flash disk, berinteraksi dengan perangkat XBox, berinteraksi dengan perangkat berbasis Android, mengendalikan kamera digital (tipe/merek tertentu) dan masih banyak lagi.
Untuk tahap
belajar, Arduino Uno adalah yang terbaik karena kita belum perlu port I/O yang banyak,
disamping itu harganya lebih murah. Namun untuk aplikasi yang lebih luas,
Arduino Mega adalah yang ideal, karena memiliki kecepatan lebih tinggi, port
lebih banyak dan dukungan komunikasi data yang lebih handal.
Berikut ini merupakan langkah-langkah pemrograman mulai dari awal. Secara garis besar,
langkah-langkahnya adalah instalasi software, driver dan menghubungkan modul
Arduino ke PC lewat USB, baru bisa kita program.
1. Inisialisasi
software dan driver
Silakan
unduh perangkat lunak Arduino di website arduino.cc lalu masuk ke Download,
pilih versi 1.0.5 saja dan pilih sesuai operating system PC Anda, lalu instal.
Setelah itu hubungkan perangkat papan Arduino menggunakan kabel USB.
Anda tidak perlu menambahkan sumber tegangan ke modul, karena sudah bisa
aktif dengan menggunakan tegangan dari PC. Setelah itu, jika PC
mendeteksi adanya perangkat baru, silakan instal driver-nya dengan merujuk file
dari hasil instalasi. (cek di Program Files/Arduino/drivers). Periksa di control
panel, apakah sudah muncul perangkat baru di bagian serial
communication. Jika sudah, berarti tidak ada kendala.
2. Menjalankan
program Arduino
Eksekusi
program Arduino (klik icon Arduino di desktop), lalu setelah muncul jendela bernuansa
biru, kita bisa mengetes apakah Arduino dan PC sudah benar-benar terhubung.

- Konfigurasi jenis papan Arduino, pilih menu Tools > Board > lalu pilih sesuai jenis papan Arduino Anda.
- Selanjutnya konfigurasi serial port, pilih Tools > Serial Port > lalu pilih sesuai nama serial port (bisa diperiksa di Control Panel > System > Device Manager).
- Sekarang saatnya kita coba upload dan compile ke Arduino. Dalam hal ini kita menggunakan program yang sudah ada dalam contoh. Pilih File > Examples > Basics > Blink
- Lalu muncul jendela baru, berisi kode/program untuk menyalakan lampu LED berkedip setiap satu detik. Program ini dijamin tidak ada kesalahan, jadi cukup dibaca saja, jangan dimodifikasi dulu. Langsung saja pilih File > Upload atau tekan tombol icon panah. Lalu tunggu sebentar dan perhatikan LED yang ada di papan Arduino. Setelah sukses, LED akan berkedip dengan frekwensi 1 detik.
3. Pemrograman
pada Arduino
Secara struktur program
pada umumnya memiliki tiga bagian utama, yaitu deklarasi variabel
(juga konfigurasi library
jika ada), sub program setup dan program utama (main loop).

- Ada dua macam variabel dilihat dari cakupan dimana variabel itu bekerja. Yang pertama adalah variabel global yang cakupannya berada di seluruh program, sedangkan variabel local cakupannya hanya pada satu sub program atau satu loop tertentu seperti while dan for. Variabel global biasanya kita letakkan paling atas.
- Deklarasi sub program setup adalah berisi kumpulan instruksi atau pernyataan yang hanya perlu dipanggil satu kali saja. Contohnya adalah mengatur sebuah pin apakah sebagai input atau output. Juga untuk menyatakan variabel-variabel global dengan nilai awal.
- Program utama (main loop) adalah kumpulan instruksi atau pernyataan yang dilakukan secara berulang-ulang. Di dalam program utama ini, kita boleh memanggil sub program lain yang bisa juga kita buat terpisah. Juga di dalamnya bisa kita sisipi iterasi (pengulangan) menggunakan while atau for. Ada banyak instruksi yang bisa kita pakai untuk aplikasi pemrograman di Arduino, dan semua itu bisa dilihat di website arduino.cc pada bagian reference. Bagi pemula, saya kira tidak perlu mengetahui semua, tapi cukup yang dasar saja. Instruksi yang lain bisa kita pelajari seiiring dengan tingkat kompleksitas aplikasi yang kita kembangkan.
Sintak yang wajib
diketahui adalah if, if … else, while, for, semua operasi arimatika dan relasional,
fungsi pinMode, digitalWrite, digitalRead, delay, tipe data int, char, byte,
string dan array
1. Pengertian
dan Fungsi
 |
| IC Decoder 74LS48 |
Decoder adalah suatu
rangkaian logika yang berfungsi untuk mengkonversikan kode yang kurang dikenal
manusia kedalam kode yang lebih dikenal manusia. Pengertian Decoder adalah alat yang di gunakan untuk
dapat mengembalikan proses encoding sehingga kita dapat melihat atau menerima
informasi aslinya. Pengertian Decoder juga dapat di artikan sebagai rangkaian
logika yang di tugaskan untuk menerima input input biner dan mengaktifkan salah
satu outputnya sesuai dengan urutan biner tersebut. Rangkaian dekoder mempunyai sifat yang berkebalikan
dengan enkoder yaitu merubah kode biner menjadi sinyal
diskrit.
Fungsi Decoder adalah untuk memudahkan kita dalam menyalakan
seven segmen. Itu lah sebabnya kita menggunakan decoder agar dapat dengan cepat
menyalakan seven segmen. Output dari decoder maksimum adalah 2n.
Jadi dapat kita bentuk n-to-2n decoder. Jika kita ingin merangkaian decoder
dapat kita buat dengan 3-to-8 decoder menggunakan 2-to-4 decoder. Sehingga kita
dapat membuat 4-to-16 decoder dengan menggunakan dua buah 3-to-8 decoder.
Beberapa rangkaian
decoder yang sering kita jumpai saat ini adalah decoder jenis 3 x 8 (3 bit
input dan 8 output line), decoder jenis 4 x 16, decoder jenis BCD to Decimal (4
bit input dan 10 output line) dan decoder jenis BCD to 7 segmen (4 bit input
dan 8 output line). Khusus untuk pengertian decoder jenis BCD to 7 segmen
mempunyai prinsip kerja yang berbeda dengan decoder decoder lainnya, di mana
kombinasi setiap inputnya dapat mengaktifkan beberapa output linenya.
2. Blog
Diagram Rangkaian Decoder
- Decoder 2 to 4

- Decoder 3 to 8 (Biner to Octal Decoder)

- Decoder 4 to 10 (BCD to Decimal Encoder)

Rangkaian
Dekoder BCD ke desimal ditunjukan pada gambar diatas. Unsur informasi dalam hal ini
adalah sepuluh angka desimal yang diwakili oleh sandi BCD. Masing-masing
keluarannya sama dengan 1 hanya bila variabel masukannya membentuk suatu
kondisi bit yang sesuai dengan angka desimal yang diwakili oleh sandi BCD itu.
Tabel D2 menunjukkan hubungan masukan dan keluaran dekoder tersebut. Hanya
sepuluh kombinasi masukan pertama yang berlaku untuk penentuan sandi itu, enam
berikutnya tidak digunakan dan menurut definisi, merupakan keadaan tak acuh.
Jelas keadaan tak acuh itu pada perencanaannya digunakan untuk menyederhanakan
fungsi keluarannya, jika tidak setiap gerbang akan memerlukan empat masukan.
Untuk kelengkapan analisis tabel D2 memberikan semua keluaran termasuk enam
kombinasi yang tidak terpakai dalam sandi BCD itu; tetapi jelas keenam
kombinasi tersebut tidak mempunyai arti apa-apa dalam rangkaian itu.
3. Rangkaian Gerbang Logika Decoder
- Decoder 2 to 4

- Decoder 3 to 8 (Biner to Octal Decoder)

- Decoder 4 to 10 (BCD to Decimal Decoder)

4. Tabel Kebenaran Rangkaian
- Tabel kebenaran decoder 2 to 4

- Tabel kebenaran decoder 3 to 8 (Biner to Octal Decoder)

- Tabel kebenaran decoder 4 to 10 (BCD to Decimal Decoder)

5. IC
yang digunakan
Dekoder dapat dibentuk dari
susunan gerbang logika dasar atau menggunakan IC dekoder yang telah ada
dipasaran seperti 74LS48, 74LS154, 74LS138, 74LS155 dan sebagainya.
74LS48

Konfigurasi Pin IC
- Jalur input data BCD, pin input ini terdiri dari 4 line input yang mewakili 4 bit data BCD dengan sebutan jalur input A, B, C dan D.
- Jalur output 7 segmen, pin output ini berfungsi untuk mendistribusikan data pengkodean ke penampil 7 segmen. Pin output dekoder BCD ke 7 segmen ini ada 7 pin yang masing-masing diberi nama a, b, c, d, e, f dan g.
- Jalur LT (Lamp Test) yang berfunsi untuk menyalakan semua led pada penampil 7 segmen, jalur LT akan aktif pad saat diberikan logika LOW pad jalut LT tersebut.
- Jalur RBI (Riple Blanking Input) yang berfungsi untuk menahan sinyal input (disable input), jalur RBI akan aktif bila diberikan logika LOW.
- Jalur RBO (Riple blanking Output) yang berfungsi untuk menahan data output ke penampil 7 segmen (disable output), jalur RBO ini akan aktif pada sat diberikan logika LOW.
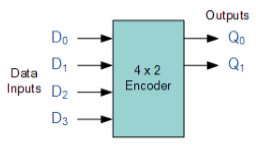
1. Pengertian
dan Fungsi


Encoder
adalah suatu rangkaian logika yang berfungsi untuk mengkonversikan kode yang
lebih dikenal oleh manusia ke dalam kode yang kurang dikenal manusia. Encoder adalah rangkaian yang memiliki
fungsi berkebalikan dengan dekoder. Encoder berfungsi sebagai rangakain untuk
mengkodekan data input mejadi data bilangan dengan format tertentu. Encoder
dalam rangkaian digital adalah rangkaian kombinasi gerbang digital yang
memiliki input banyak dalam bentuk line input dan memiliki output sedikit dalam
format bilangan biner. Encoder akan mengkodekan setiap jalur input yang aktif
menjadi kode bilangan biner. Dalam teori digital banyak ditemukan istilah
encoder seperti “Desimal to BCD Encoder” yang berarti rangkaian digital yang
berfungsi untuk mengkodekan line input dengan jumlah line input desimal (0-9)
menjadi kode bilangan biner 4 bit BCD (Binary Coded Decimal). Atau “8 line to 3
line encoder” yang berarti rangkaian encoder dengan input 8 line dan output 3
line (3 bit BCD).
2. Blog Diagram Digital Encoder
- Encoder 4 to 2
- Encoder 8 to 3 (Octal to Biner Encoder)

- Encoder 10 to 4 (Decimal to BCD Encoder)

3. Rangkaian
Gerbang Logika Encoder
- Encoder 4 to 2

- Encoder 8 to 3 (Octal to Biner Encoder)

- Encoder 10 to 4 (Decimal to BCD Encoder)

4. Tabel
Kebenaran Rangkaian
- Encoder 4 to 2

- Encoder 8 to 3 (Octal to Biner Encoder)

- Encoder 10 to 4 (Decimal to BCD Encoder)

5. Persamaan
Logika Output Encoder 10 to 4
Y3 = X8 + X9
Y2 = X4 + X5 + X6 + X7
Y1 = X2 + X3 + X6 + X7
Y0 = X1 + X3 + X5 + X7 + X9
6. IC 74LS147 (Decimal to BCD Encoder)
IC
yang banyak digunakan untuk membuat rangkaian Encoder adalah IC 74147. IC ini
berfungsi untuk mengkodekan 10 line data input menjadi data dalam bentuk BCD.
IC ini merupakan encoder data decimal menjadi data BCD dengan input aktif LOW
dan output 4 bit BCD aktif LOW.
-
Kofigurasi dari IC tersebut adalah sebagai berikut:

- Memiliki 9 jalur input decimal terletak pada kaki yang diberi simbol input 1 sampai 9 dan memiliki kondisi aktif LOW.
- Memiliki 4 jalur output DCB yang terletak pada kaki yang diberi simbol Q0 sampai Q3 dan memiliki kondisi aktif LOW.
- Untuk memberikan tegangan sumber terletak pada pin Vcc (kaki no 16) dan pin GND (kaki no 8).

- Tabel Kebenaran IC 74LS147

Dipasaran terdapat 2
tipe motor servo yaitu servo standard dan servo rotation (continuous).
Dimana biasanya untuk tipe standar hanya dapat melakukan pergerakan sebesar
180° sedangkan untuk tipe continuous dapat melakukan rotasi atau 360°.





Pada dasarnya motor
servo tersusun dari motor DC, rangkaian kontrol, gearbox dan potensiometer.
Berikut gambar motor servo beserta komponen internal motor servo.


Terlihat jelas bahwa
motor DC yang digunakan sangat kecil (compact) sehingga motor servo memiliki
dimensi yang cukup kecil jika dibandingkan dengan motor DC pada umumnya.
Rangkaian kontrol pada motor servo digunakan untuk mengontrol motor DC yang ada
pada motor servo, dikarenakan untuk mengakses motor servo kita harus memberikan
pulsa-pulsa kepada sinyal kontrol tersebut. Gearbox berfungsi untuk
meningkatkan torsi dari motor servo, sebernarnya terdapat dua macam bahan
penyusun gearbox yang digunakan untuk motor servo yaitu metal gear (biasanya
untuk torsi yang sangat besar) dan nylon gear (berwarna putih seperti gambar
diatas). Dan potensiometer berfungsi untuk menentukan batas sudut dari putaran
servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa
yang dikirimkan.
Dikarenakan bentuknya
yang compact motor servo sering digunakan untuk aplikasi robotik, biasa
digunakan untuk penggerak kaki dan tangan robot.
Servo motor mempunyai 3
buah pin yang terdiri dari VCC, GND dan pin SIGNAL. Berikut adalah konfigurasi
pin motor servo berdasarkan merk.

Sekarang akan
dijelaskan bagaimana cara mengakses motor servo. Secara umum untuk mengakses
motor servo tipe standard adalah dengan cara memberikan pulsa high selama 1,5
ms dan mengulangnya setiap 20 ms, maka posisi servo akan berada ditengah atau
netral (0°). Untuk pulsa 1 ms maka akan bergerak berkebalikan arah jarum jam
dengan sudut -90°. Dan pulsa high selama 2 ms akan bergerak searah jarum
jam sebesar 90°. Untuk lebih jelasnya perhatikan gambar berikut.

Sedangkan untuk servo
motor tipe continuous untuk berputar (rotasi) searah jarum jam harus
diberi pulsa high selama 1,3 ms. Sedangkan untuk berputar berlawanan arah jarum
jam harus diberi logika high selama 1,7 ms. Jika motor servo continous diberi
pulsa high selama 1,5 ms maka akan berhenti.
Catatan: karakteristik lamanya pulsa high
yang diberikan untuk mengatur motor servo tergantung dari merk yang
digunakan dengan mengacu kepada datasheet.
Pin SIGNAL pada motor servo dapat dikoneksikan ke pin mana
saja pada mikrokontroler, lihat gambar dibawah. Disini saya akan memberikan
contoh program cara mengakses motor servo menggunakan program CodeVision AVR.

Dibawah ini beberapa fungsi program untuk mengakses motor
servo standard
void gerak-90derajat()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1);//pulsa high diberikan selama 1 ms
PORTD.0=0;
delay_ms(20)
}
void gerak90derajat()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(2);//pulsa high diberikan selama 2 ms
PORTD.0=0;
delay_ms(20)
}
void gerak0derajat()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1.5);//pulsa high diberikan selama 1,5 ms
PORTD.0=0;
delay_ms(20)
}
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1);//pulsa high diberikan selama 1 ms
PORTD.0=0;
delay_ms(20)
}
void gerak90derajat()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(2);//pulsa high diberikan selama 2 ms
PORTD.0=0;
delay_ms(20)
}
void gerak0derajat()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1.5);//pulsa high diberikan selama 1,5 ms
PORTD.0=0;
delay_ms(20)
}
Sedangkan untuk motor servo continuous tidak
jauh berbeda seperti motor servo standard.
void putarsearahjarumjam()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1.3);//pulsa high diberikan selama 1,3 ms
PORTD.0=0;
delay_ms(20)
}
void putarlawanjarumjam()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1.7);//pulsa high diberikan selama 1,7 ms
PORTD.0=0;
delay_ms(20)
}
void stop()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1.5);//pulsa high diberikan selama 1,5 ms
PORTD.0=0;
delay_ms(20)
}
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1.3);//pulsa high diberikan selama 1,3 ms
PORTD.0=0;
delay_ms(20)
}
void putarlawanjarumjam()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1.7);//pulsa high diberikan selama 1,7 ms
PORTD.0=0;
delay_ms(20)
}
void stop()
{
PORTD.0=1;//memberikan pulsa high
delay_ms(1.5);//pulsa high diberikan selama 1,5 ms
PORTD.0=0;
delay_ms(20)
}







